Модуль TB6612 управления двигателем 15V 1.2/3.2A
Код товара: 86809
В наличии 100 шт.
1+
191,50 ₽
7+
182,40 ₽
30+
173,70 ₽
Количество:
Код товара: 86809
В наличии 100 шт.
1+
191,50 ₽
7+
182,40 ₽
30+
173,70 ₽
Количество:
Драйвер TB6612 позволяет управлять двумя коллекторными или одним шаговым двигателем и является улучшенным аналогом модуля DRV8833. В отличие от DRV8833, в этом модуле имеются отдельные входы ШИМ для каждого канала и требуется отдельное напряжение для питания логики. Микросхема TB6612FNG, лежащая в основе модуля, содержит два независимых Н-моста, рассчитанных на напряжение от 4,5 до 13,5 В, при рабочем токе каждого канала до 1,2 А. Пиковый ток может достигать до 3,2 А на каждый канал.
Допускается увеличение рабочего тока путём параллельного объединения двух каналов драйвера в один. В этом случае можно управлять одним коллекторным двигателем в том же диапазоне напряжений с рабочим током до 2,4 А. Объединение каналов осуществляется соединением выводов AO1+BO1, AO2+BO2, AIN1+BIN1, AIN2+BIN2, PWMA+PWMB.
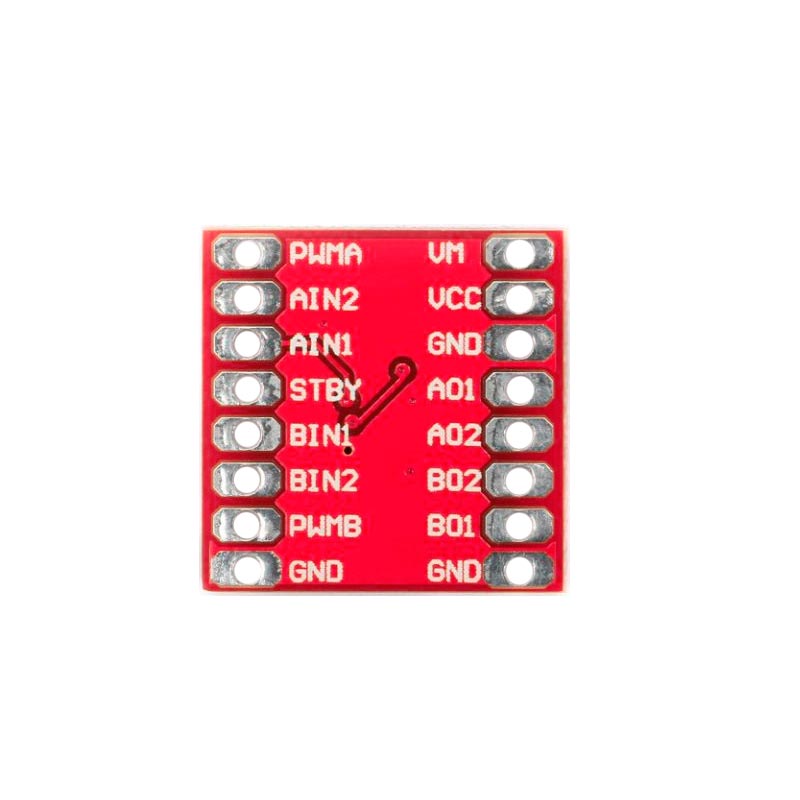
Напряжение питания логики 5 вольт подаётся на выводы VCC и GND модуля, а двигателей - VM и GND. Выводы VCC и VM допускается объединять, если напряжение питания логики и двигателей одинаковы и находятся в диапазоне 2,7 ... 5.5 вольт. Низкий логический уровень на входе STBY переводит модуль в спящий режим.
Первый двигатель подключается к выводам AO1 и AO2, а управление им осуществляется подачей логических уровней на входы AIN1 и AIN2. Второй двигатель подключается к выводам BO1 и BO2, а управление им, соответственно осуществляется подачей логических уровней на входы BIN1 и BIN2.
| VM: | положительный провод напряжения питания двигателей |
| VCC: | положительный провод напряжения питания логики |
| GND: | общий провод (земля) |
| AIN1, AIN2: | входы управления первым двигателем |
| BIN1, BIN2: | входы управления вторым двигателем |
| AO1, AO2: | выходы для подключения первого двигателя |
| BO1, BO2: | выходы для подключения второго двигателя |
| STBY: | вход установки спящего режима |
| PWMA: | вход управления ШИМ первого двигателя |
| PWMB: | вход управления ШИМ второго двигателя |
Двигатели подключённые к выводам AO1, AO2 и BO1, BO2 управляются подачей логических уровней на входы AIN1, AIN2 и BIN1, BIN2 соответственно. Обратите внимание на то, что выходы инвертируют сигналы своих входов.
| Входы | Выходы | |||||
|---|---|---|---|---|---|---|
| AIN1 | AIN2 | PWM | STBY | AO1 | AO2 | Режим |
| 1 | 1 | 1/0 | 1 | 0 | 0 | Быстрое торможение |
| 0 | 1 | 1 | 1 | 0 | 1 | Вращение в прямом направлении |
| 0 | 1 | 0 | 1 | 0 | 0 | Быстрое торможение |
| 1 | 0 | 1 | 1 | 1 | 0 | Вращение в обратном направлении |
| 1 | 0 | 0 | 1 | 0 | 0 | Быстрое торможение |
| 0 | 0 | 1 | 1 | Z | Z | Стоп (свободное вращение) |
| 1/0 | 1/0 | 1/0 | 0 | Z | Z | Спящий режим (стоп, свободное вращение) |
Для второго двигателя, вместо выводов AIN1, AIN2, AO1, AO2, используются выводы BIN1, BIN2, BO1, BO2 соответственно.
Модуль поддерживает управление с использованием широтно-импульсной модуляции. В этом случае, для ускоренного затухания в обмотках электродвигателя возбуждаемого эффектом противо-ЭДС тока, используется метод быстрого торможения.
| Напряжение питания логики, В | 2,7 ... 6 |
| Напряжение питания двигателей, В | 4,5 ... 13,5 |
| Ток нагрузки долговременный на канал, мА | 1,2 |
| Ток нагрузки пиковый на канал, А | 3,2 |
| Габаритные размеры, мм | 21 × 18 × 3 |
| Масса, г | 3,2 |