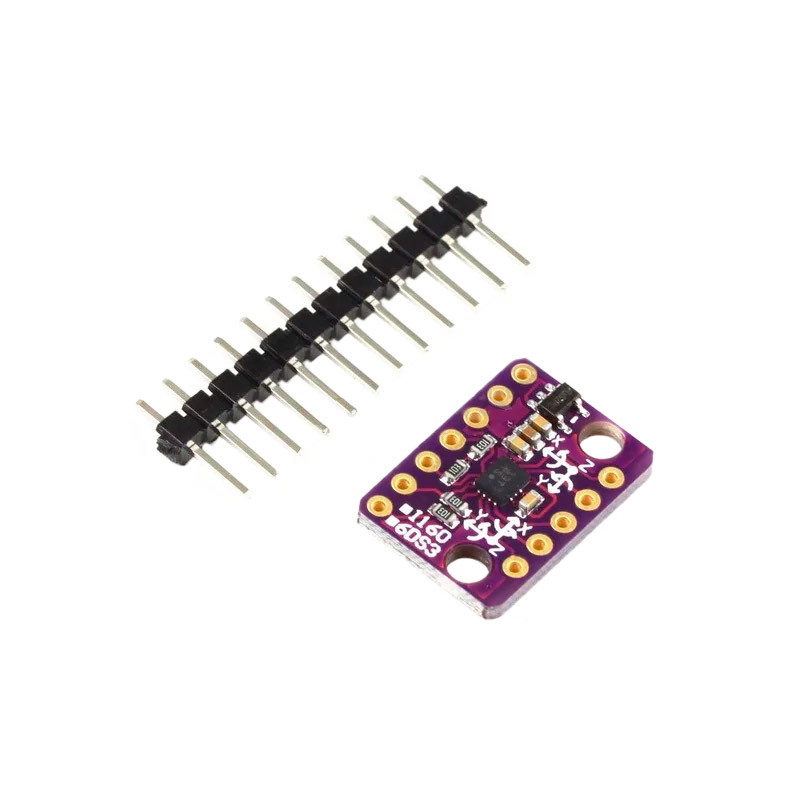
Модуль GY-BMI160 датчик ускорения и 3-осевой гироскоп с I2C интерфейсом
Код товара: 86262
В наличии 50 шт.
1+
168,70 ₽
10+
160,70 ₽
25+
153,00 ₽
Количество:
Код товара: 86262
В наличии 50 шт.
1+
168,70 ₽
10+
160,70 ₽
25+
153,00 ₽
Количество:
Модуль GY-BMI160 предназначен для определения расположения и перемещения объекта в пространстве с помощью 3-осевого гироскопа и 3-х осевого акселерометра. Данный модуль может использоваться для проектирования квадрокоптеров, стабилизатора для камеры или других проектов, выполненных на платформе Arduino.
Гироскоп модуля измеряет угловое ускорение тела по 3 осям (X, Y, Z), а акселерометр вычисляет ускорение тела вдоль одного направления. Для определения ускорения, акселерометр использует пьезоэлектрический эффект. В состоянии покоя модуль постоянно производит калибровку датчика. Так же датчик может определять и регистрировать динамические параметры при движении.
Плата модуля спроектирована на базе микросхемы BMI160 компании BOSCH. С её помощью модуль может сам делать расчеты и обрабатывать информацию. Результирующие данные содержатся в кольцевом буфере FIFO. Размер хранилища буфера FIFO 1024 байт.
Подключается модуль к Arduino или другим микропроцессорным устройствам с помощью I2C интерфейса. Подключается I2C через выводы SCL (тактовые импульсы) и SDA (данные датчика). Для обеспечения питания платы используется контакты VIN или 3V3 и GND. Напряжение может подаваться от внешнего источника питания или от платы Arduino. Напряжение 5В подаётся на контакт VIN, а напряжение 3,3В на вывод 3V3. Для питания от 5 вольт, модуль GY-BMI160 содержит понижающий линейный стабилизатор. При питании от 5 вольт к выводу 3V3 можно можно подключить дополнительное устройство с током потребления не более 50 мА.
| Напряжения питания, В | 3,3 ... 5 |
| Максимальный потребляемый ток, мА | 1 |
| Диапазон ускорения, g | ±2, ±4, ±8, ±16 |
| Диапазон измерения гироскопа, ° / сек | ±125, ±250, ±500, ±1000, ±2000 |
| Интерфейс передачи данных | I2C |
|
Габаритные размеры, мм |
18 × 13 × 3 |
| Масса, г | 2,1 |
 |
Документация BMI160 |