Модуль MX1508 двухканальный драйвер коллекторного двигателя
Код товара: 86813
В наличии 100 шт.
1+
33,70 ₽
10+
32,10 ₽
25+
30,60 ₽
Количество:
Код товара: 86813
В наличии 100 шт.
1+
33,70 ₽
10+
32,10 ₽
25+
30,60 ₽
Количество:
Модуль драйвера двигателя на микросхеме MX1508 предназначен для управления коллекторными двигателями постоянного тока малой и средней мощности. Он широко применяется в учебных робототехнических конструкторах, мобильных платформах и экспериментах с микроконтроллерами, где требуется управлять направлением вращения и скоростью двигателя.
Основное назначение драйвера заключается в том, чтобы взять на себя работу с токами двигателя, разгрузив микроконтроллер. Выводы Arduino не рассчитаны на питание двигателя напрямую, поэтому между микроконтроллером и мотором обязательно используется драйвер.
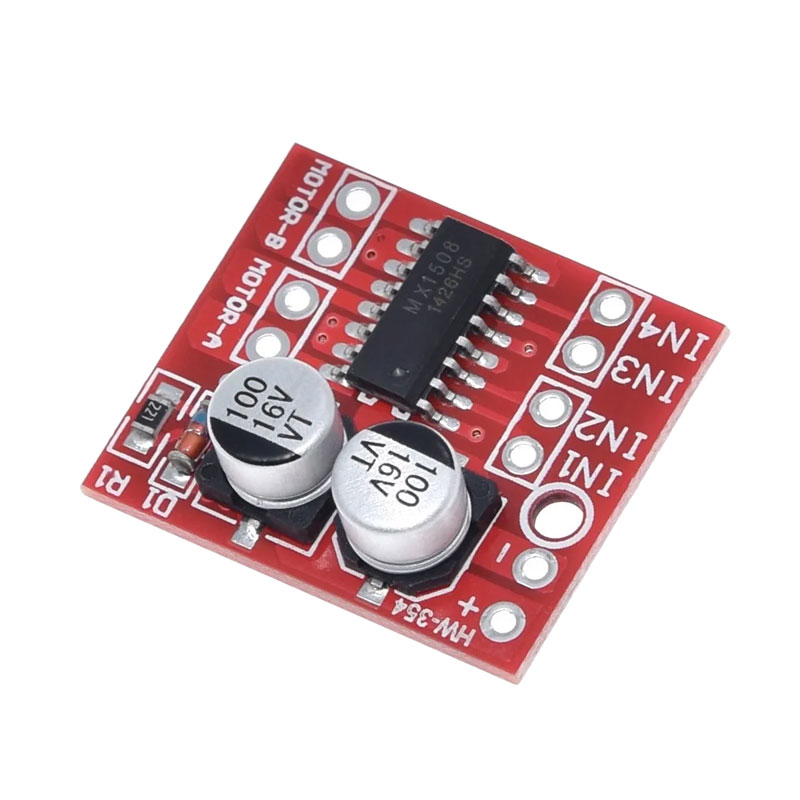
В основе модуля лежит микросхема MX1508, представляющая собой двухканальный драйвер с интегрированными силовыми ключами. По своему функционалу она представляет собой два Н-моста, которые позволяют управлять либо двумя независимыми двигателями постоянного тока, либо одним шаговым двигателем в двухфазном режиме.
Каждый канал микросхемы построен по схеме Н-моста. Н-мост состоит из четырёх электронных ключей, позволяющих подавать питание на двигатель в прямой или обратной полярности. Изменяя комбинацию включённых ключей, можно заставить двигатель вращаться в одном направлении, в противоположном или полностью остановить его. В микросхеме MX1508 эти ключи реализованы на МОП-транзисторах с низким сопротивлением открытого канала, что снижает тепловые потери и повышает эффективность работы.
Питание модуля подаётся на контакты, обозначенные на плате "+" и "–". Напряжение питания должно находиться в диапазоне от 2 до 9,6 вольт, что делает модуль удобным для работы с батарейками, аккумуляторами и лабораторными источниками питания. Логическая часть микросхемы также питается от этого же напряжения, через параметрический стабилизатор, собранный на резисторе 220 ом и стабилитроне 5,6 В.
Управление каждым каналом осуществляется двумя входами. Эти входы подключаются к цифровым выводам микроконтроллера. В зависимости от логических уровней на входах драйвера формируется направление тока через двигатель. Если на один вход подан высокий уровень, а на другой низкий, двигатель вращается в одну сторону. При обратной комбинации уровней направление вращения меняется. Если оба входа находятся в низком уровне, двигатель свободно останавливается, а если оба входа находятся в высоком уровне, происходит активное торможение за счёт короткого замыкания обмотки двигателя через ключи моста.
Регулировка скорости вращения двигателя может осуществляться с помощью широтно-импульсной модуляции. Микроконтроллер формирует PWM-сигнал на одном из входов драйвера, быстро включая и выключая питание двигателя. Среднее напряжение на обмотке двигателя изменяется пропорционально коэффициенту заполнения импульсов, что приводит к изменению скорости вращения. Микросхема MX1508 корректно работает с PWM-сигналами, формируемыми стандартными таймерами Arduino, что делает её удобной как для учебных экспериментов, так и для использования в законченных устройствах.
Схемотехнически микросхема содержит встроенные защитные элементы. В неё заложена защита от сквозных токов, когда одновременно открываются верхний и нижний ключ одного плеча моста. Также учитываются особенности индуктивной нагрузки, которой является двигатель. Внутренние диоды и структура МОП-транзисторов обеспечивают путь для тока самоиндукции при отключении питания, что защищает ключи от перенапряжений.
На плате модуля контактные площадки для подключения двигателей маркированы "MOTOR-A" и "MOTOR-B", а выводы для подключения управляющих сигналов, соответственно "IN1-IN2" и "IN3-IN4". Это облегчает понимание схемы при первом знакомстве с модулем и упрощает последующую работу с ним.
|
"+": |
Положительный вывод питания |
| "–" : | Отрицательный вывод питания (общий) |
| IN1: | Вход управления вперёд (канал 1) |
| IN2: | Вход управления назад (канал 1) |
| IN3: | Вход управления вперёд (канал 2) |
| IN4: | Вход управления назад (канал 2) |
| MOTOR-A: | Выходы подключения 1 двигателя |
| MOTOR-B: | Выходы подключения 2 двигателя |
При подключении модуля MX1508 к Arduino питание двигателя подаётся на соответствующий вход модуля, а общий провод обязательно соединяется с общим проводом Arduino. Управляющие входы подключаются к цифровым выводам микроконтроллера, причём для управления скоростью рекомендуется использовать выводы, поддерживающие аппаратный ШИМ (PWM). Программно важно обеспечить, чтобы одновременно не подавались конфликтующие сигналы, хотя внутренняя логика микросхемы частично защищает от подобных ситуаций.
Следует учитывать, что MX1508 рассчитана на ограниченный ток нагрузки. При длительной работе с двигателями, потребляющими ток, близкий к предельному, микросхема может заметно нагреваться. Поэтому в практических конструкциях рекомендуется обеспечивать хороший теплоотвод и избегать режимов длительного стопорения двигателя, при которых ток резко возрастает.
В учебных проектах модуль MX1508 ценен тем, что наглядно демонстрирует принципы управления электродвигателем с помощью Н-моста, работу широтно-импульсной модуляции и взаимодействие микроконтроллера с силовой электроникой. Он является логичным следующим шагом после изучения цифровых выходов Arduino и позволяет перейти к созданию более сложных мехатронных и робототехнических систем.
| Напряжение питания, В | 2 ... 9,6 |
| Максимальный ток нагрузки на 1 канал, А | 1,5* |
| Пиковый ток нагрузки, А | 2,5 |
| Ток потребления микросхемы в режиме покоя, мкА | 0,1 |
| Ток потребления модуля в режиме покоя, мА | 18,2** |
| Диапазон рабочих температур, °С | -20 ... +85 |
| Габаритные размеры, мм | 25 × 21 × 7 |
* При работе двух каналов одновременно, ток каждого канала не должен превышать 0,8А.
**При напряжении питания 9,6. Этот ток в основном обусловлен потреблением параметрического стабилизатора, который обеспечивает питание логической части микросхемы.
 |
Документация MX1508 |
|
Подключение модуля MX1508 к Ардуино |